摘要:基于“3D(Direct-current/Direct-current/Duty-ratio)-△D”技术手法,研发了一种性价比很高的风光互补发电系统的MPPT(MaximumPowerPointTracking)智能调控设施。实验结果表明:所研发的“3D-△D”MPPT智能调控设施不仅调控方便、简捷、灵敏、准确,而且新颍、先进、实用、经济。该“3D-△D”MPPT调控设施已在南通理工学院新能源应用技术实训基地稳健的运行着。
1.引言
风光互补发电系统可以充分利用风能和太阳能资源进行发电,白天可能具有较好的太阳能资源,夜间则可能具有较好的风能资源。尤其是具有太阳能和风能资源丰富并且互补性好的地域,其经济效益和社会效益相当可观。为了克服风能和太阳能的不确定性而导致系统发电与用电不平衡,进一步增强风光互补发电系统的稳健性,必须创建优良的控制设施,自动进行MPPT(MaximumPowerPointTracking),将发电控制、功率调节和负载置配融合为一个最佳系统。
2.风能发电设施的MPPT调控方法
风能发电设施常用MPPT控制法有:离散迭代MPPT控制法、风速自动跟踪MPPT控制法、风轮机转速反馈MPPT控制法等;这些方法性价比都不高。为此,此文研发了一种性价比较高的“3D”(Direct-current/Direct-current/Duty-ratio)MPPT调控法。所谓“3D”调控法,即通过控制器的软、硬件设施产生占空比可调的驱动功率开关管的PWM信号,从而实现系统输出电压和电流的自动调节,且随时检测风能发电机的电压并同控制器所设定的安全电压值进行比较:如果高于安全电压值则通过串联在其中的功率开关管对发电机电压进行减小调节。另外,当蓄电池充满电或遇大风(即超过风电机组的额定风速)时则启动卸荷电路进行卸荷,以保系统设施的安全。
风能发电机发电经整流器和DC/DC(Direct-Current/Direct-Current)变换器连接到负载。采样设施完成对电压、电流的采样,MPPT控制算法根据当前功率值与前一采样时刻功率值的差值,通过3D调控来调节发电机输出功率,从而达到MPPT目的目标。
此“3D”MPPT调控法,是基于“阻抗匹配获最大功率”的理论:即当线性电路中的负载等效电阻同其电源内阻相等时,负载可获最大功率,可见进行MPPT实质上就是进行阻抗变换,故通过“3D”MPPT调控法来保持系统时时刻刻为阻抗匹配状况(实际上只能达到“准匹配”状况),便可实现MPPT。风电机组的输出功率P与DC/DC占空比D的特性曲线如图1所示,由图1可见,每一种风速(此图只绘出了风速从6米/每秒至15米/每秒这10种风速对应的P-D曲线)都各自对应唯一的最大功率点。
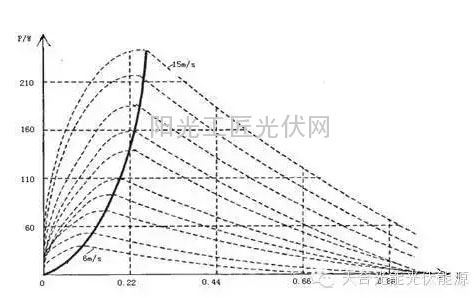
图1风电机组的P一D特性曲线
3.太阳能(光伏)发电设施的MPPT调控方法
太阳能(光伏)发电输出功率不仅与日照强度和温度有关,而且与光伏电池组件工作电压有关,只有使其工作在特定工作电压上,才可能寻优到最大功率点。光伏发电的MPPT调控方法及设施,就是研究如何使得光伏电池组件工作在特定工作电压上。光伏电池组件I-V特性和P-V特性如图2所示,显而易见其最大输出功率点随环境变化。[3]通过实时调控光伏电池组件工作点,能使其总是工作在最大输出功率点附近,这就是光伏发电设施MPPT拟求的功效目标。
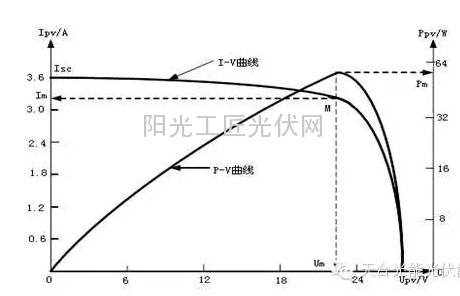
图2光伏电池组件的I-V和P-V特性曲线
光伏发电设施中目前应用比较广泛的MPPT方法主要有:恒定电压法、扰动法、电导增量法等,然而这些方法的性价比都不高。如何寻优一种性价比高的方法至关重要,本文研发的△D(即动态改变占空比D)法就是在此背景下创建的,此方法的基本模式为Dm=Dm-1+△D,其中Dm和Dm-1分别为第m及第m-1时刻的占空比。若△D固定步长不变,当△D选得过大,则容易造成震荡;而△D选得过小,则MPPT动态性能变差。此文研究表明,如果△D为一变量,就能很好的解决固定不变出现的上述问题。
因为即使对于同一系统,在不同状态下,△D的选择对于动态和稳态性能均影响很大。而通过动态改变△D值就能使MPPT寻优快速得以实现。因光伏设施的输出功率PPV=U2PVD2/Rl(当不计效率影响),其中UPV和Rl分别为光伏设施的输出电压和负载等效电阻,可见,若负载不变,PPV与D2成比例关系(因实际工作中UPV基本不变)。
所以△D的选取对于系统性能影响至关重要。为使系统适应性强,利用初始化时由算模自动设置参数。此文通过大量的理论研究和实验研究的结果表明:D的最佳更新规则为Dm=Dm-1+BDA,其中A=UPV△D+D△UPV,而BD初始化时可由算模依据初始状态自动设置(即BD=︱△D/A︱),这样只需检测光伏电池组件输出电压,依据系统运作状态,便可进行△D迭代,使得MPPT灵敏度得以提高。因步长是算模依检测系统状态自动设置的,故系统能应用在不同场合且不需人工设置步长初始值,很便捷。
4.3D-△D法的设施
此文研究的风电与光伏MPPT调控法(即“3D-△D”法) 所涉及的风光互补发电系统的基本架构如图3所示,其主要由风力发电机组、太阳能(光伏)电池方阵、智能控制器、逆变器、整流器、蓄电池组等组成,其中智能控制器主要包括控制核DSP、开关管、“3D-△D”调控器、液晶显示器LCD、PWM信号驱动电路、采样/检测电路(即风能发电机电压与电流检测、光伏电池方阵电压与电流检测、逆变器电压与电流检测、蓄电池电压及其充放电电流检测、温度检测)等器件。该系统对交直流负载均可供电。
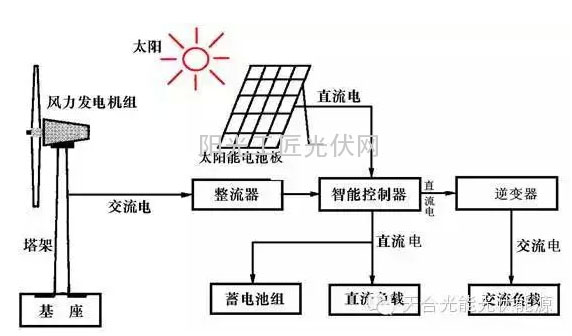
图3 风光互补发电系统的基本架构
5.结论
在对该风光互补发电系统进行MPPT时,风电和光伏两部分可共用一套“3D-△D”设施,这样既可大大降低系统成本又可简化控制策略,而且由DSP通过“软硬兼施”的技术手段进行调控,即在各功率开关管的栅极上产生相应的PWM驱动信号,以调节开关管的占空比来实现MPPT的智能调控。
该风光互补发电系统已研制成功,并在南通理工学院新能源工程系的新能源应用技术实验实训基地运行了一年多的时间,运行十分稳健;而且还分别对风力发电设施、光伏发电设施和风光互补发电设施进行了在线实测运行,且通过数据采集模块检测出这三种设施分别输出功率如表1所示,由表1可见,光伏输出功率和风电输出功率都受外界因素影响发生变化,而基于“3D-△D”调控法的风光互补发电系统MPPT设施能快速准确的跟踪外部环境变化,使系统输出功率基本保持在最大输出功率值左右,即系统发电的稳健性较好;而且还不出现系统输出功率在最大功率点附近发生“功率振荡”现象。
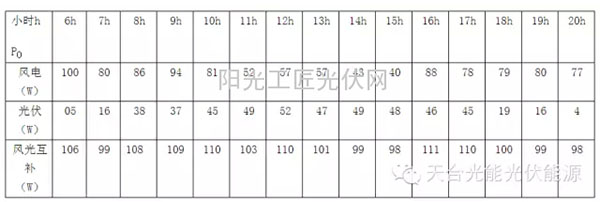
表1 风光互补发电系统三种设施的输出功率