据New Atlas报道,在未来的某一天,以阳光为动力的机器人有可能能够游过海洋溢油区,并在游动中吸收石油。现在一个微小的功能原型已经被创造出来,它的灵感来自蒸汽机和昆虫。受水黾启发,加州大学河滨分校的科学家们目前正在开发的"Neusbot"设备。水黾是一种利用脉动运动在水面上滑行的昆虫。
目前,该机器人的尺寸仅为20毫米长、5毫米宽,它的身体是一个扁平、漂浮的三层薄膜的形式。顶层由透明的聚酰亚胺塑料制成,中间层是多孔水凝胶,底层是PDMS(聚二甲基硅氧烷)聚合物。
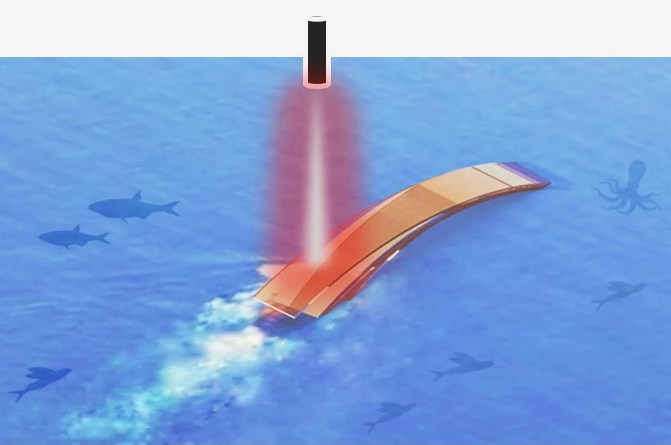
水凝胶内的氧化铁和铜纳米棒将光能转化为热量,使凝胶吸收的液态水汽化。由此产生的蒸汽在凝胶中形成一个气泡,对薄膜的顶层和底层施加机械压力和热能。
因为聚酰亚胺(顶层)的热膨胀系数比PDMS(底层)低,所以薄膜的反应是向上弯曲。一旦气泡破裂,薄膜就会重新变平,但随着下一个气泡的形成,又会再次弯曲。因此,Neusbot能够通过连续振荡在水面上移动。
研究人员表示,它目前的最高速度约为每秒1.3毫米。在目前基于实验室的设置中,光线以激光束的形式出现,机器人可以通过改变该光束的角度来实现左转或右转。
最终,研究人员希望更大的由阳光驱动的Neusbots可以配备第四层吸油材料。然后,它们可以被部署在石油泄漏点上,它们将自行移动,之后它们将被从水中收回。
首席科学家李志伟说:“如果用太阳光作动力,这种机器是可持续的,不需要额外的能源。这种薄膜也是可以重复使用的。”
关于这项研究的论文最近发表在《科学机器人》杂志上。